Tất cả những phát minh vĩ đại đều bắt đầu từ những điều nhỏ bé, những khao khát, ước muốn của con người, với mong muốn có thể tự động khâu vận chuyển hàng hóa, con người đã dần dần nghĩ ra những chiếc xe tự động đầu tiên vào những năm 1950.
Kể từ khi xuất hiện đến nay, xe tự hành agv đã đóng góp một phần vào những giải pháp tự động nhà xưởng, nhà kho, mang lại hiệu quả to lớn cho các doanh nghiệp. Hôm nay cùng với mình tìm hiểu tổng quan về lịch sử hình thành và phát triển, phân loại của xe tự hành agv nhé.
Contents
Xe tự hành Agv là gì?
Xe tự hành AGV (Automated Guided Vehicle), là một phương tiện di chuyển không người lái, di chuyển theo các đường line từ được dán trên sàn hoặc sử dụng sóng vô tuyến, camera quan sát, laser để điều hướng. Chúng thường được sử dụng trong các ứng dụng công nghiệp để vận chuyển vật liệu nặng xung quanh công xưởng, chẳng hạn như nhà máy hoặc nhà kho. Ứng dụng của Xe tự hành Agv được mở rộng vào cuối thế kỷ 20.
Lịch sử hình thành và phát triển của xe tự hành agv?
Điều hướng bằng dây điện
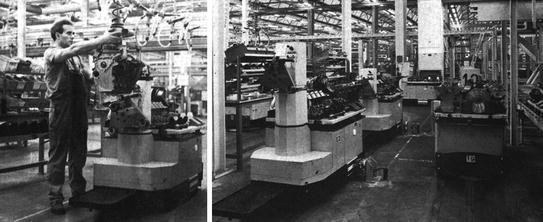
Xe tự hành AGV đầu tiên được đưa ra thị trường vào những năm 1950, bởi Barrett Electronics ở Northbrook, Illinois, vào thời điểm đó, nó chỉ đơn giản là một chiếc xe kéo đi theo dây điện được chôn dưới sàn.
Một dây tín hiệu được đặt sâu khoảng 2cm dưới bề mặt sàn. Dây này được dùng để điều hướng cho AGV và để truyền tín hiệu radio. Một cảm biến được lắp đặt ở dưới gầm của AGV, vị trí gần mặt đất nhất. Cảm biến sẽ phát hiện vị trí tương đối của tín hiệu vô tuyến được truyền từ dây. Thông tin này được sử dụng để điều chỉnh mạch lái, làm cho AGV đi theo đúng lộ trình dây tín hiệu được chôn sẵn dưới sàn nhà xưởng.
Điều hướng bằng hệ thống băng từ
Nhận thấy những khó khăn khi sử dụng dây điện chôn dưới sàn để điều hướng, vào năm 1960, các kỹ sư thời bấy giờ đã cho ra đời phương pháp điều hướng bằng băng từ hay còn gọi là nam châm cuộn, nam châm dẻo. Thay vì sử dụng dây điện được chôn cố định dưới sàn, người ta sử dụng băng từ được dán trên sàn, nó có thể dễ dàng được gỡ bỏ và di dời theo lộ trình khác nếu lộ trình di chuyển từ vị trí cấp hàng tới vị trí sản xuất cần thay đổi, điều này làm giảm chi phí đầu tư và linh hoạt trong khâu chuẩn bị.
Đây là phương pháp điều hướng xe tự hành AGV phổ biến tại Việt Nam đến thời điểm hiện tại.
Có 2 loại băng được sử dụng:
- Loại từ tính.
- Loại màu.
Đến hiện tại, nhiều mẫu xe tự hành agv với nhiều chủng loại kiểu dáng khác nhau đã được phát triển, các phương pháp điều hướng cũng ngày càng đa dạng hơn, có thể kể đến như là:
Điều hướng bằng laser, điều hướng bằng quán tính,…
Hệ thống điều hướng bằng laser
Công nghệ dẫn đường bằng laser sử dụng một số gương phản xạ đặt trên tường/dầm, máy móc dọc theo tuyến đường, theo sau là các phương tiện, cho phép bộ điều khiển tính toán vị trí của xe.

AGV mang trên mình một bộ cảm biến phát và thu laser. Các tia laser được truyền đi và phản chiếu lại vào bộ cảm biến, từ đó, góc và (đôi khi) khoảng cách đến bất kỳ gương phản xạ nào trong tầm nhìn và trong phạm vi được tự động tính toán. Thông tin này được so sánh với bản đồ bố trí gương phản xạ đã được lưu trong bộ nhớ của AGV. Điều này cho phép hệ thống định vị tam giác (xác định vị trí của 1 điểm nhờ vào vị trí giao nhau của 3 đường tròn với bán kính xác đinh) vị trí hiện tại của AGV. Vị trí hiện tại được so sánh với đường dẫn được lập trình trong bản đồ bố trí phản xạ. Điều hướng được điều chỉnh phù hợp để giữ việc theo dõi AGV. Sau đó, nó có thể được điều hướng đến một mục tiêu mong muốn bằng cách sử dụng vị trí cập nhật liên tục.
Hệ thống điều hướng bằng quán tính
Một hình thức khác của điều hướng AGV là điều hướng quán tính. Với điều hướng quán tính, một hệ thống điều khiển máy tính sẽ điều khiển và phân công nhiệm vụ cho các phương tiện.
Bộ tiếp sóng được nhúng trong sàn của nơi làm việc. AGV sử dụng các bộ tiếp sóng này để xác minh rằng chiếc xe đang hoạt động. Một con quay hồi chuyển có thể phát hiện sự thay đổi nhỏ nhất về hướng của chiếc xe tự hành và điều chỉnh nó để giữ AGV luôn đi đúng đường. Biên độ sai số của phương pháp quán tính là ± 25.4mm.
Quán tính có thể hoạt động trong hầu hết mọi môi trường kể cả các lối đi chật hẹp hoặc trong điều kiên nhiệt độ khắc nghiệt. Điều hướng quán tính có thể bao gồm việc sử dụng nam châm nhúng trong sàn nhà xưởng mà phương tiện có thể đọc và làm theo.
Như vậy là chúng ta đã tìm hiểu tông quan về Xe tự hành Agv, lịch sử hình thành, phân loại các loại xe, Nếu các bạn có thắc mắc hoặc cần tư vấn về xe tự hành Agv có thể liên hệ số hotline: 0931 477 868.
Xin cảm ơn!
RECENT POSTS: